高精度なピックアンドプレース用ロボットアームは、操作の正確性と高速性により、生産性の高いパフォーマンスを実現します。協働ロボット(コボット)は、製造現場におけるタスクの迅速・安定・安全な導入を可能にし、多くの反復作業、例えばピックアンドプレースに適しています。そのため、これらの作業をコボットに任せることで、より効率的かつコストパフォーマンスに優れた運用が可能となります。
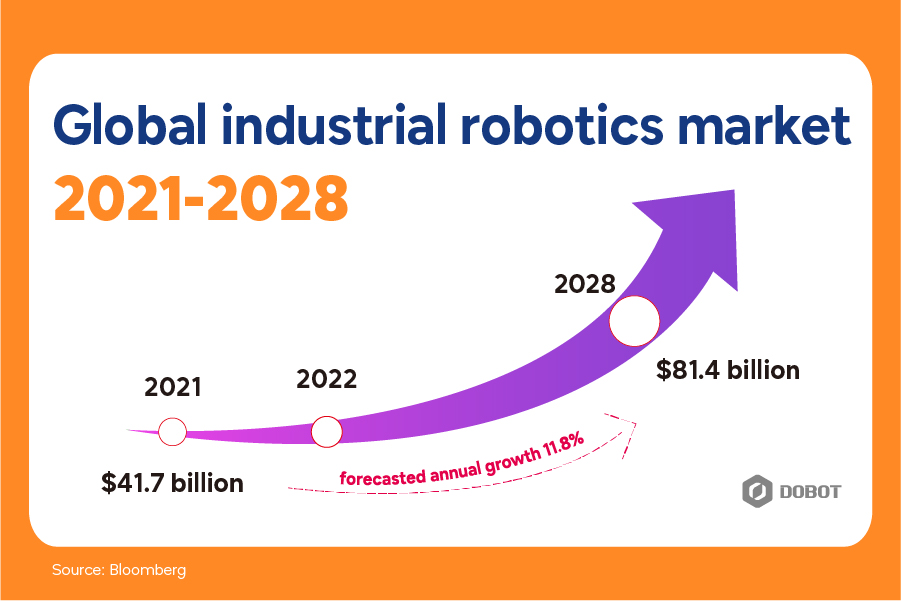
2022年以降、ピックアンドプレース用ロボットアーム市場は成長を続けています。ブルームバーグの報告によると、世界の産業用ロボット市場は2028年までに年平均11.8%の成長が見込まれており、市場規模は814億ドルに達すると予測されています。一方、2021年時点では約417億ドルの規模で推移していました。
さまざまな業種において、ロボティックプロセスオートメーションの導入は大きなメリットをもたらしています。今年注目されているロボット技術のトレンドの一つとして、ロボティックプロセスオートメーションへの投資は、企業のライフサイクル全体において長期的な決断となり得ます。その中でも、ピッキング用ロボットアームは、自動化の推進および製造プロセスの最適化をさらに加速させる存在となります。それでは、ピックアンドプレース用ロボットアームの産業応用の可能性、その導入を成功させるための要素、そして注目すべき事例としてのDobot協働ロボットについて、さらに詳しく見ていきましょう。

ピックアンドプレースは比較的シンプルで反復的なアプリケーションであるものの、幅広い産業分野での活用が可能です。
その対象となる主な産業分野は以下の通りです:
食品加工において、ピックアンドプレースが活用される代表的な工程が、包装およびパレタイジングです。食品をピックアップして箱詰めし、さらに包装するという一連の作業は、多くの時間と労力を要します。
このようなタスクにおいて、協働ロボットの導入は大きな効果を発揮します。協働ロボットのプログラミングが簡単で、短時間での立ち上げが可能であり、特別な設備やリソースを追加することなく、正確な動作を実現します。これにより、作業時間と人件費の削減が可能となり、従業員を単調で負担の大きい作業から解放し、より高度で付加価値の高い業務に割り当てることが可能となります。
ピックアンドプレース用ロボットアームは、人と並んで安全に稼働できる設計となっているため、電子機器の製造現場においても積極的に導入が進んでいます。これにより、生産性の最大化、処理能力の向上、さらには製品イノベーションの推進が期待されています。 バッテリー、充電器、プロセッサ、モニターといった電子部品の多くは小型かつ精密であり、手作業による取り扱いには高い集中力とスキルが求められます。こうした課題に対して、さまざまなロボットアクセサリーを活用することで、作業の一貫性と品質を確保することが可能になります。例えば、グリッパーや吸着パッドなどのエンドエフェクターを組み合わせることで、ロボットアームは繊細かつ確実なピックアンドプレース動作を実現し、組立工程や検査工程の効率化に大きく貢献します。
医療・製薬業界では、さまざまな医薬品関連ツールや器具の安定した供給が常に求められています。特に、数多くのピペットや高度な分析装置、ディスペンサーが稼働する研究・製造現場では、有害な液体や薬品を正確かつ安全に取り扱うことが極めて重要です。
このような環境において、ピックアンドプレース用ロボットアームは、液体の精密な計量や注入、指定位置への正確な配置といった作業において、高い再現性と安全性を実現します。ロボットによる自動化により、作業者の負担やヒューマンエラーのリスクを軽減しつつ、品質の一貫性と生産性の向上を同時に達成することが可能です。
このように、ピックアンドプレース技術は多くの業界で活用が進んでおり、製造ラインの自動化を目的としてロボットアームやエンドエフェクターへの投資が年々増加しています。 しかしながら、産業ごとに求められるロボットアクセサリーは異なるため、用途や処理内容に応じて適切なロボットアームおよび先端ツールを選定することが、工程の一貫性と品質維持の鍵となります。

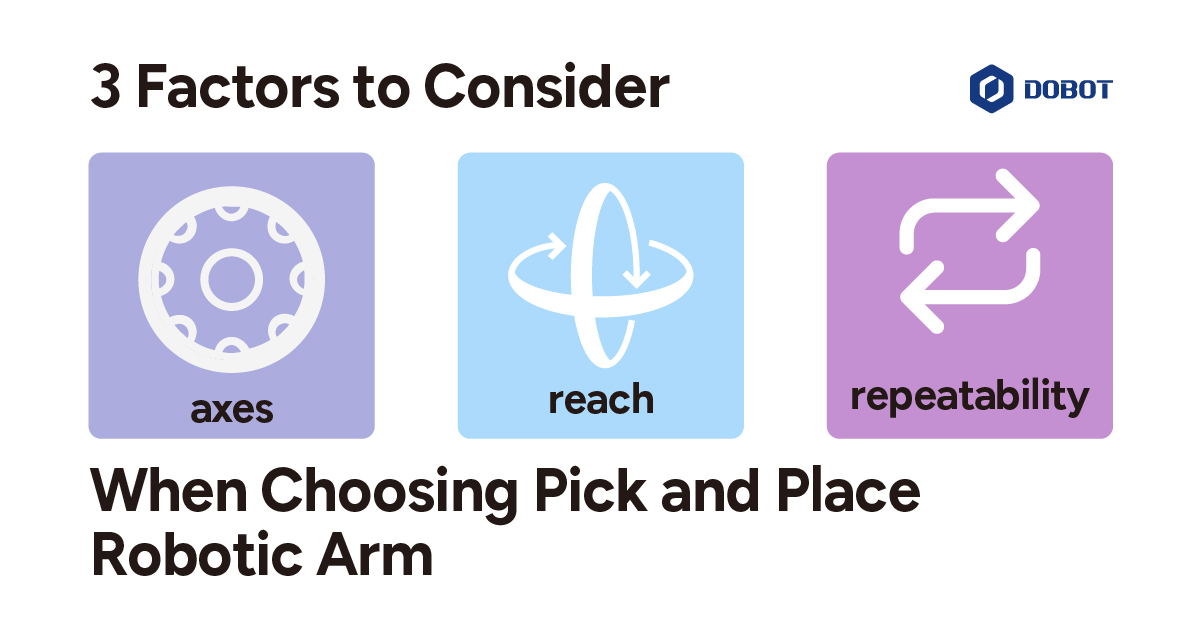
成長を続けるビジネスニーズに対応するために、最適なピックアンドプレース用ロボットアームを選定する際は、選択に影響を与えるさまざまな要素を考慮することが重要です。
その中でも、特に注目すべき主な要素は以下の通りです:
ロボットアームの軸数は、その動作可能な方向や自由度を意味します。6軸ロボットアームは柔軟性が高く、生産ライン上で多様な作業に対応できるのが特長です。一方で、4軸の協働ロボットは方向性や姿勢制御において同等の適応性を持たないため、用途に応じた選定が重要となります。
作業スペースが広いほど、協働ロボットにはより大きなリーチが求められます。一方で、製造ラインにおいて広範囲の作業が不要であれば、ピックアンドプレースの動作範囲が小さくても十分なロボットアームの方が、より適切かつ効率的な選択となる場合があります。
繰り返し位置きめ精度とは、ロボットアームが同一の動作を繰り返した際に、常に同じ位置・姿勢で対象物を配置できる能力を指します。この性能は、ピックアンドプレースのように反復作業が中心となる工程において、製品品質や工程の安定性に直結する重要な要素です。特に、精密な位置決めや誤差の許容範囲が極めて小さいアプリケーションにおいては、繰り返し精度の高いロボットを選定することで、ピックアンドプレース作業においても常に安定した動作を維持でき、製品品質のばらつきを最小限に抑えることができます。
ピックアンドプレース用ロボットアームの選定において重要となる要素を踏まえ、私たちは製造自動化に最適なソリューションをご用意しました。
ピックアンドプレースの成功には、以下の3つの要素が重要です:
Dobotのロボットアームは、効率的なピックアンドプレースに必要な3つの要素すべてを備えています。Dobot製品によるピックアンドプレースの成功事例として、以下のような応用があります:
軽量設計の協働ロボット「DOBOT MG400」は、溶接作業やプラズマ洗浄といったアプリケーションにも対応可能です。500g未満の金属シートをピックアップして正確に配置することができ、省スペースな作業環境でも柔軟に導入できる点が特長です。
DOBOT MG400協働ロボットは、バッテリーやスイッチなど、小型電子部品のピックアップおよび配置を正確かつ効率的に行います。精密さと安定性が求められる製造工程において、MG400は高い汎用性を発揮します。
柔軟なピックアンドプレース用ロボットアームは、イノベーションを加速させ、多様化するニーズに応じた新たな可能性を切り拓きます。
今こそ、自社の課題に最適なソリューションを見つけてみませんか。
Dobotの専門家との連絡を確立
自動化の変革に参加しましょう。より効率的な将来を目指して、一緒に頑張りましょう。
File sent
Join Dobot+ Ecosystem to Forge Deeper Partnerships




 金属加工
金属加工
 自動車
自動車
 食品&飲料
食品&飲料
 化学
化学
 エレクトロニクス
エレクトロニクス
 ニューリテール
ニューリテール
 医療
医療
 半導体
半導体
 溶接
溶接
 パレタイジング
パレタイジング
 積み込み・積み降ろし
積み込み・積み降ろし
 組み立て
組み立て
 ビンピッキング
ビンピッキング
.svg) 接着
接着
 挿入
挿入
 研磨
研磨


